手拉手模型
模型 手拉手
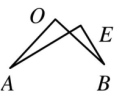
如图,△ABC是等腰三角形、△ADE是等腰三角形,AB=AC,AD=AE,
∠BAC=∠DAE=。
结论:△BAD≌△CAE。
等腰三角形分为:等边三角形、等腰直角、任意等腰三角形,几种特殊情况分别讨论如下:
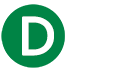
1、等边三角形
条件:△OAB,△OCD均为等边三角形
结论: ;
; ;
;
导角核心:
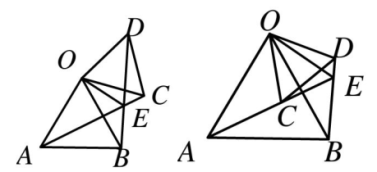
2、等腰直角三角形
条件:△OAB,△OCD均为等腰直角三角形
结论: ;
; ;
;
导角核心:
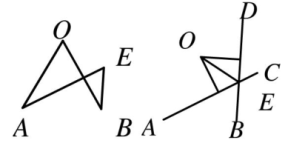
3、任意等腰三角形
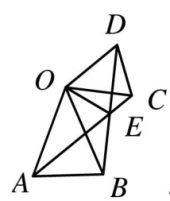
条件:△OAB,△OCD均为等腰三角形,且∠AOB = ∠COD
结论: ;
; ;
;
核心图形:

核心条件: ;
; ;
;
接下来,将针对以“两个等边三角形”为载体的模型与方法进行分析和讲解。
两个等边三角形放在一起,最常见的就是“手拉手模型”,这个模型包含了许多非常重要的结论和方法!
重点给大家分享一下两个等边三角形放在一起的模型,其中最最重要的就是 两个等边三角形共顶点的模型,俗称 “手拉手模型”。
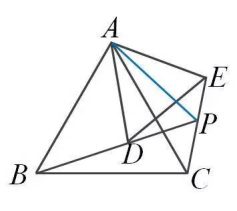
无论两个等边三角形的相对位置如何△ACD≌△BCE(SAS)始终成立。
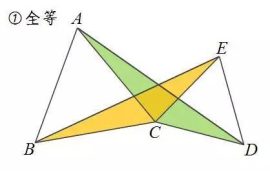
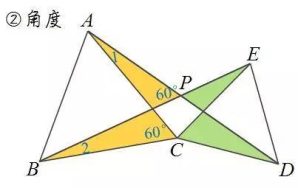
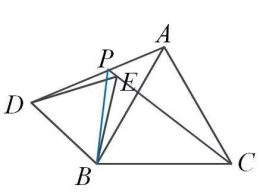
第二个不变性质是角度问题,如下图:
根据第一条性质的全等,得出∠1=∠2,再依据“蝴蝶模型”或者“8”字模型倒角或者“四点共圆”都可以得出AD和BE的夹角 ∠APB=60°,这个结论不随等边三角形的相对位置变化而变化,也具有不变性。
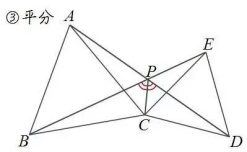
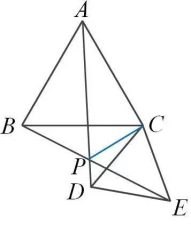
第三个不变性质是角平分线,如下图:
CP始终平分∠BPD,也就是说∠BPC=∠DPC =60°始终成立。
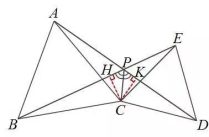
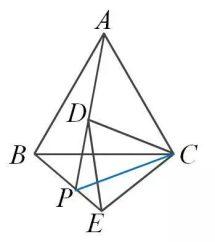
 证法1:
证法1:
如下图,分别作BE和AD的垂线段CH和CK,由△ACD≌△BCE(SAS),可以知道△ACD和△BCE的面积相等,底也相等,全等三角形对应高也相等,所以高CH=CK.根据角平分线的性质,可以知道CP平分∠BPD.
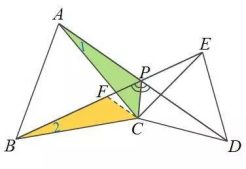
如下图,根据 ∠1=∠2,AC=BC,在BP上截取BF=AP,则△ACP≌△BCF(SAS),
于是,CF=CP,∠FCP=∠BCA=60°,所以△FPC是等边三角形。
这样,也就得出∠FPC=∠DPC=60°,CP平分∠BPD.
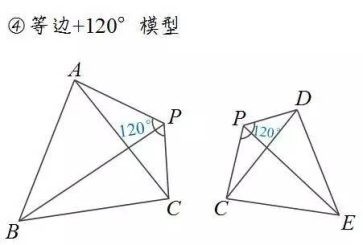
第四个不变性质就是“等边+120°模型”(这里中考不做要求)
这个模型在这里始终会出现。
也就是说在这个模型中,BP=CP+AP,PE=CP+PD始终成立。
最后,以上这些结论看似简单,但是要想让学生彻底掌握,需要进行巩固和强化训练,训练的方式最好就变换不同的角度和相对位置,让自己再去证明一次,找到所有的全等、不变角、角平分线、线段和差模型、等性质。
下面我先给大家继续介绍经典几何模型—手拉手模型,特殊位置下的特殊结论,这也是历年数学中考常考的几何压轴题型之一。
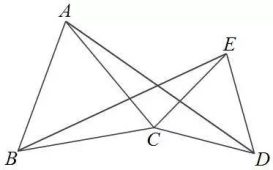
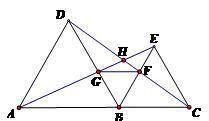
例1、在直线ABC的同一侧作两个等边三角形△ABD和△BCE,连接AE与CD,证明:
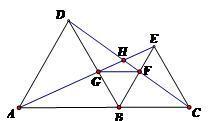 (2)AE=DC
(2)AE=DC
总结: “两个共顶点的等边三角形的手拉手模型”,对于这个模型的研究,给出了三个方向:
我们本次内容仅仅涉及了到对于基本模型的不变性质的研究。这些不变性质涉及到了全等、角度、角平分线以及等边+120度线段和差模型等。







评论0